Competitors
Competing Teams
October 4-7, 2016 - University of Alcalá, Alcalá de Henares, Madrid, Spain
Track 1 - Smartphone-based
Team Name
WiMag
Corresponding Author
Haiyong Luo
Affiliation
Institute of Computing Technology Chinese Academy of Sciences; Beijing University of Posts and Telecommunications
Description
The WiMag indoor localization system combines magnetic fingerprint matching, INS, altitude measurement, Wi-Fi fingerprint and particle filter together. WiMag is a lowcost, practical and accurate indoor localization system which only relies on Wi-Fi signals and enabled sensors in smartphones. In WiMag, the Wi-Fi fingerprint is exploited to estimate target’s initial or coarse location. We construct the three-dimensional magnetic fingerprint instead of the traditional one-dimensional magnetic amplitude fingerprint. The three-dimensional magnetic fingerprint contains higher space discernibility compared with the magnetic amplitude fingerprint. The weights of the particles are computed based on the DTW similarity between the online-collected three-dimensional magnetic fingerprints of one step and the training fingerprints corresponding to the same space area. The position estimation obtained by the particle filter is also calibrated by the position estimation obtained by a long-distance magnetic trajectory matching positioning when available and necessary.

Team Name
WMLoc
Corresponding Author
Tao Gu, Brian Bai
Affiliation
RMIT University
Description
The WMLoc system is a new Wi-Fi and geomagnetic based smartphone tracking system. A number of tracking algorithms have been developed for the system in order to obtain a real-time precise location of the smartphone user. The preliminary results showed that the average root-mean-square (RMS) error of the WMLoc system was between 2 and 3 m.
Team Name
XMUH
Corresponding Author
Lingxiang Zheng Ao Peng
Affiliation
Xiamen University, Xiamen, China
Description
The system collects data using the accelerometer, gyroscope and gravity sensors embedded in the smartphone. The accelerometer and gravity data are used for zero-velocity detection and calculating the vertical displacement of each walking step, and then the inverted pendulum model is applied to calculate the step length of every step. The angle of direction is estimated by processing gyroscope data with the quaternion method. The step length and the direction angle of each step are combined to determine the coordinates of each step. A Kalman filter is used in zero-velocity-update (ZUPT) to reduce the vertical speed offset caused by accelerometer drift errors.
Team Name
NavIndoor
Corresponding Author
Frank Ebner, Toni Fetzer
Affiliation
University of Applied Sciences Würzburg-Schweinfurt
Description
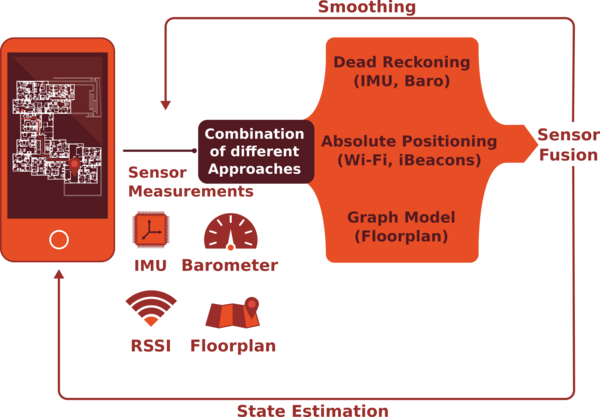
NavIndoor is the indoor localisation and navigation system developed at the University of Applied Sciences Würzburg-Schweinfurt and the University of Siegen, Germany. It is a highly modular system fusing different sensors, namely Wi-Fi, iBeacons, barometer, step- and turn-detection. Additionally, extended knowledge provided by prior and past data is incorporate by natural walking paths and smoothing. Compared to many other systems, we avoid any time-consuming fingerprinting and calibration processes. Further, we do not need any prior information on the pedestrian’s starting position. The system performs all calculations in real time on a commercial smartphone using a high number of samples for approximation. It is implemented in modern C++ using the Qt framework
Team Name
xposition
Corresponding Author
Zhongliang Zhao
Affiliation
Institute of Computer Science, University of Bern, Switzerland
Description
In this work, we present a real-time precise indoor localization approach that exploits WiFi Receiving Signal Strength Indicator (RSSI) readings, IMUs, and floor plan information by fusing them in an enhanced particle filter. The algorithms are designed and implemented into a terminal-based system, which uses commercial smart-phones and WiFi access points. Our approach can achieve an average tracking error of 1 meter and 90% accuracy is 1.7 meters.
Team NameSamsung logo
Samsung
Corresponding Author
Andrew YongGwon Lee, Abhishek Kumar, Pawel Wilk, Wojciech Jaworski
Affiliation
Samsung, Korea DMC R&D Center & Poland R&D Center
Description
Indoor Positioning System provides real time indoor location with few meters accuracy and can be introduced in all venues in which Wi-Fi access points are installed.
System operates without access to the internet, so all resources are placed on sdcard or provided by Android OS. Positioning engine relies on information from Wi-Fi sensor and inertial motion sensors incorporated in the smartphone.
In order to determine users position bayesian filter fuses information about location from Wi-Fi positioning system with information from PDR module.
Track 2 - Pedestrian Dead Reckoning

Team Name
EKF-based Magneto-Inertial Dead-Reckoning Navigation System
Corresponding Author
Charles-Ivan Chesneau
Affiliation
Sysnav, France Gipsa-lab, CNRS research unit
Description
Data from a prototype sensor board comprising inertial sensors and a magnetic sensors network is provided to an EKF to compute a dead-reckoning trajectory. Velocity estimates are made possible thanks to spatial variations of the magnetic field.
Team Name
Foot Mounted Inertial Navigation System using Estimated Velocity Update During the Contact Phase
Corresponding Author
Chan Gook Park, Hojin Ju, So Young Park
Affiliation
Seoul National Univ., Korea
Description
In this paper, we propose foot mounted inertial navigation system using estimated velocity update during the contact phase. Generally, foot mounted PDR system often use zero-velocity update (ZUPT) for reducing the inflence of the bias and white noises in the gyroscope and accelerometer signals. However, transient and large acceleration and angular velocity, which cannot be mesured by the IMU used in PDR, occur momentarily in heel-strike phase. Therefore, ZUPT cannot estimate the accurate error states of the filter because the velocity is not reliable after heel strike. In order to improve the PDR system performance, the proposed algorithm uses the estimated velocity measurement by using the constraint between the surface and the foot during the contact phase.
Team Name
Foot-mounted indoor Pedestrian Positioning System based on Low-cost Inertial Sensors
Corresponding Author
Ao Peng
Affiliation
School of Information Science and Engineering, Xiamen University, China
Description
Foot-mounted MEMS inertial sensor based indoor pedestrian positioning system, conposed of a 6-axis accelerator and gyroscope, a 3-axis magnetometer, a barometer and an on-board compute module.
Team Name
Pedestrian Positioning from Wrist-worn Wearable Devices
Corresponding Author
Luis Enrique Diez
Affiliation
University of Deusto, Spain
Description
Implementation of a Pedestrian Dead-Reckoning system characterized by placing the sensor unit (IMU, magnetometer and barometer) on the wrist, in order to take advantage of the current availability of smartwatches and smartbands.
Team Name
A Multifloor Hybrid Inertial/Barometric Navigation System
Corresponding Author
Nicolo Strozzi
Affiliation
University of Parma, Italy
Description
Link to paper in the conference proceedings
Team Name
Accurate Dual-foot Micro-inertial Navigation System with Inter-agent Ranging
Corresponding Author
ZhouLing Xiao et al.
Affiliation
University of Electronic Science and Technology of China, China
Description
To address the problem of accurate navigation without relying on additional infrastructures, this work proposes an accurate dual-foot micro-inertial autonomous navigation system. By fusing the ranging measurements between two feet, the proposed system can significantly reduce the accumulated error of inertial measurement units (IMUs) and the initial estimated error in navigation frame which improve the tracking accuracy and robustness.
Team Name
D-ZPUT based Pedestrian Dead-Reckoning System Using Low Cost IMU
Corresponding Author
Yu Liu, Shenglong Li, Kai Guo
Affiliation
Tianjin University, China
Description
The proposed position tracking system with foot-mounted IMU sensor is an indoor navigation system by using the Dual Zero velocity UpdaTe(D-ZUPT) which estimates the dynamic step length and reduces the drift errors which come from the IMU sensing errors or data processing. Several methods (i.g. ZARU and HDR) are also adopted to reduce the heading drifts in our system. Finally, a Kalman-based filter is applied to estimate the accurate position and attitude of the pedestrian.
Team Name
Pedestrian Dead Reckoning Based on a Kinematic of Human Activity Classification by Using Multi-MEMS sensors for 3D positioning
Corresponding Author
Jihoon Yang
Affiliation
Dept of EEE, Univ. of Surrey, UK
Description
Track 3 - Smartphone-based (off-site)
Team Name
NavIndoor
Corresponding Author
Frank Ebner, Toni Fetzer
Affiliation
University of Applied Sciences Würzburg-Schweinfurt
Description
NavIndoor is the indoor localisation and navigation system developed at the University of Applied Sciences Würzburg-Schweinfurt and the University of Siegen, Germany. It is a highly modular system fusing different sensors, namely Wi-Fi, iBeacons, barometer, step- and turn-detection. Additionally, extended knowledge provided by prior and past data is incorporate by natural walking paths and smoothing. Compared to many other systems, we avoid any time-consuming fingerprinting and calibration processes. Further, we do not need any prior information on the pedestrian’s starting position. The system performs all calculations in real time on a commercial smartphone using a high number of samples for approximation. It is implemented in modern C++ using the Qt framework.

Team Name
HFTS
Corresponding Author
Stefan Knauth
Affiliation
Stuttgart University of Applied Sciences - HFT Stuttgart
Description
Our system is based on Smartphone PDR employing magnetic, gyro, acceleration and WiFi sensors. Sensor data is preprocessed and fused, and then passed to a particle filter. Several methods for position estimates using the PF state are investigated. Carefully adjusted step detection and heading estimation algorithms are applied.
Link to paper in the conference proceedings
Team Name
Yair Beer
Corresponding Author
Yair Beer
Affiliation
BlockDox
Description
WiFi Fingerprinting using Bayesian and Hierarchical Supervised Machine Learning assisted by GPS.
Link to paper in the conference proceedings

Team Name
RTLS@UM
Corresponding Author
Adriano Moreira
Affiliation
Algoritmi Research Centre, University of Minho, Portugal
Description The approach adopted for the positioning estimation system includes two steps: (i) a process to build a WiFi fingerprinting radio map by combining the ground truth information with the provided WiFi radio samples, movement estimation from the accelerometers’ data, and also additional reference points; (ii) a process to estimate the users’ trajectories that combines WiFi fingerprinting with pressure data, movement estimation, and interpolation, to estimate the building, floor, and coordinates along the trajectory.
Link to paper in the conference proceedings
Team Name
Marauder’s Map
Corresponding Author
Ta Viet Cuong, Dominique Vaufreydaz, Dao Trung Kien, Eric Castelli
Affiliation
Pervasive Interaction/LIG, CNRS, University of Grenoble-Alpes, Inria, France
MICA Institute (HUST-CNRS/UMI2954-Grenoble INP), Hanoi University of Science and Technology, Vietnam
Description
In our approach, the path-reconstruction process is split into several smaller tasks, including building identification, floor identification, user direction and speed inference. For each task, a specific set of sensors from the smartphone log data is used. Then, numerical and learning approaches are applied to extract the information of interest from the sensors' data stream. Evaluation based on the provided data is carried out using a cross validation scheme. To produce the robustness again noisy data, we combine several approaches into one on the basis of their testing results. By testing on the provided training data, we have a good accuracy on building and floor identification. Within the floor, the performance is 7.5m error distance of 75-percentile for around 3 minutes approximation.
Track 4 - Mobile Robot
Team Name
ATLAS – An Open-Source TDOA-based Ultra-wideband Localization System
Corresponding Author
Janis Tiemann
Affiliation
TU Dortmund University, Communication Networks Institute (CNI)
Description
The ATLAS localization system is based on Ultra-wideband TDOA positioning using wireless clock synchronization. A central localization server implemented in modern C++ configures the system, applies the clock synchronization algorithm, assembles the individual samples and estimates the corresponding positions using an extended Kalman filter. The positions of the receiver nodes and synchronization node have to be known in advance. The average system error in line-of-sight conditions is expected to be in the range of 20cm, depending on constellation and orientation of the nodes.
Link to paper in the conference proceedings
Team Name
Indoor Localization using Visible Light
Corresponding Author
Siu Wai Ho
Affiliation
University of South Australia and City University of Hong Kong
Description
Our positioning system uses simple hardware like Light Emitting Diodes (LEDs) and Photo-Detectors (PDs). Depending on the applications and scenarios, visible light or infra-red LEDs and PDs can be used. Our receiver consists of multiple PDs pointing to different directions for measuring the received light intensity. Based on these measurement, our special algorithm can estimate a ray connecting an LED and a receiver. The intersection of these rays provides the estimated receiver position.
Link to paper in the conference proceedings
Team Name
TOPOrtls TPM
Corresponding Author
Siarhei Huba
Affiliation
R&D Dept, TopoRTLS. Minsk, Belarus/Sandwich,MA,USA
Description
TPM is a three dimensional (can be used as 2D as well) positioning equipment based on DWM1000 UWB module by DecaWave. TPM works on anchor\tag basis. Anchors have to be installed and initiated prior a measurement. Each anchor exact location has to be used for tag position calculation, although self-positioning option is available for easier and not as accurate measurements. Tag position calculation is done with ToA (time of arrival) analytics method.
Link to paper in the conference proceedings
Team Name
Aidloc: A high acoustic smartphone indoor localization system with NLOS identification and mitigation
Corresponding Author
Zhang Lei
Affiliation
School of Control Science & Engineering, Zhejiand University, China.
Description
Aidloc is an acoustic indoor localization system based on acoustic ranging which is very convenient for smartphone positioning. For the aim of smartphone indoor localization without modify the hardware, we succeed to develop this smartphone indoor localization prototype system by taking advantage of the low transmission speed of acoustic and high robustness of chirp signal. To improve positioning precision and realize NLOS identification and mitigation, a new approach for NLOS problem and TDOA estimation based on FrFT is proposed, and the main idea of this approach is using indoor environment multipath characteristics estimated by IEMCE algorithm.
Link to paper in the conference proceedings
Team Name
Locate-US: an Ultrasonic Local Positioning System based on Encoded Beacons (Out of Competition)
Corresponding Author
Jesús Ureña
Affiliation
School of Control Science & Engineering, Zhejiand University, China.
Description
LOCATE-US is a low-cost ultrasonic local positioning system (U-LPS) for fine-grained indoor positioning of portable devices, such as smartphones or tablets, in order to offer Location Based Services (LBS) such as augmented reality, guidance or multimedia services. It uses encoded signals to obtain a more accurate determination of difference of times of arrival (DTOA), as well as high immunity to noise and robustness against multipath effect and near-far effect.
Link to paper in the conference proceedings