Datasets In-door Localization
Track 1: In-door Localization
The purpose of this document is to collect information about the “Intermediate Data” of each competitor’s system for the Track in-door localization in evAAL 2012 Competition, that took held in Madrid (Spain) in July 2012.
evAAL Competition is promoting the publication of such information during the competition tests so they can be used together with Final Datasets for research purposes.
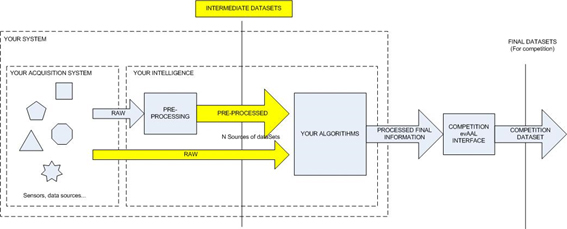
The following diagrams shows what does organization team mean by Intermediate DataSets. Each competitor may identify their own subcomponents in the building blocks below. Intermediate datasets are RAW data or Pre-processed data that you use as a input for your algorithms in order to create the final processed information which in the end is the final goal of your system.
Each competitor provides information about:
- Data sources: type of information generated by the sensing system and measurement units
- Data sets: the files containing the intermediate data.
- Devices: which devices have been used for the beanchmark and where they were places in the Living Lab.
Intermediate data summary
Competitor | Localization principle | Information | Files to be provided |
CAR (ES) | Navigation (acceleration, angular rates…) and RSS | [accelerations, angularRates, RSS, Pos, Pos_RFID, Pos_Fused] at different sampling intervals (100Hzfro raw IMU data, 1Hzpor RFID data, and 2Hz for positions). | .TXT (with info for the TCP/IP Server) mat format (a binary Matlab format). |
Lambda:4 (DE) | Navigation (acceleration, angular rates…) | [time, device IDs, distance, alphaAngularValue, PhiAngularValue, X-Position, Y-Position, arcRadius], nearly every second.( YYYY-MM-DD_HH:MM:SS;SmillaId;TransponderId;Distance[0.01m];Alpha[°];Phi[°];X-Positon[0.01m];Y-Positon[0.01m];Radius[0.01m]; TelNet Data) | .CSV |
UTAH (US) | RSS | a packet counter (the first 2 Bytes), the ID number of the transmitting node (3rd Byte), the RSS values of the packets previously transmitted by all the other nodes and received by the node identified by the 3rd Byte (from the 4th Byte to the 4th + # Nodes Byte), the communication channel used by the nodes (this value range from 11 to 26)] | test_LivingLab.txt, which contains one line for each packet transmitted by the nodes composing the system |
OwlPS (FR) | RSS | MAC address of the request's transmitter, type of the request, timestamp of the request, MAC address of the access points that captured the request, along with the signal strength measured, in dBm. | .CSV |
THAIS (ES) | RSS | [RSSI1, RSSI2, …, RSSIn, hour, minute, second, millisecond, temperature, light, battery], every 500ms. | A .TXT file containing the specified array.
|
A Fingerprint that include the RSSI value which each fixed mote sees a mobile mote in a period of time and the mobile mote coordinates in this period. | A Fingerprint database containing the described fingerprints.
| ||
LOCOSMOTION (DE) | RSS | A static WLAN fingerprint map as array of arrays that include: [x,y, DeviceRadio ID, {SignalType, AccessPoint MAC, RSSI, Channel frequency, SSID} * n ] (Where n is the number of access points visible at each point) | A file containing the fingerprint map (.TXT or CSV) |
Acceleration | Acceleration Magnitude values during the localization phase as a simple array of values | A file containing the acceleration values : .TXT | |
CONDO (CA) | Motion sensors | id – primary key nodeID – unique node identifier event_type – status of the sensor (1/0) sensor_name – type of the sensor (Motion/Switch) db_ts – human-readable timestamp ts_ms – timestamp as epoch time with milliseconds | Example provided. (exported from Database table) .CSV |